自動駕駛的感知領域中,特斯拉堅定使用純視覺方案
2020-09-17
在自動駕駛的感知領域,行業內分成了立場鮮明的兩派——視覺派和激光雷達派。特斯拉是視覺派最堅定的守護者。埃隆·馬斯克清楚地認識到視覺與激光雷達的優劣勢,同時不斷推動讓視覺方案做到本只能由激光雷達做到的事情。

特斯拉如何克服視覺劣勢?
從2D平面圖像推斷精確的3D立體實景,實際上是非常困難的。
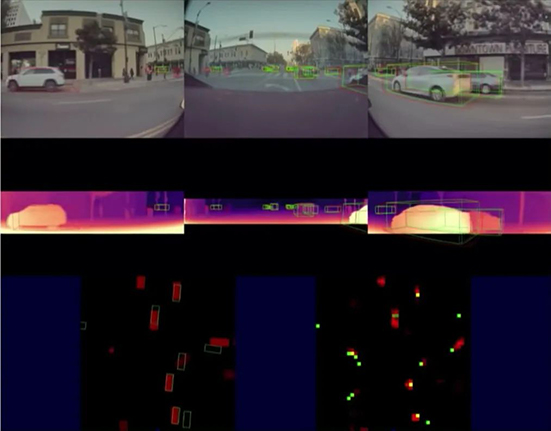
以下圖中這輛MPV為例,如果只看左側的2D圖像,似乎用視覺和激光雷達標注的形狀都是準確的,但是如果放在3D的場景中,就會發現使用視覺方案標注的形狀不僅偏長、偏窄,而且缺少了汽車的側面。
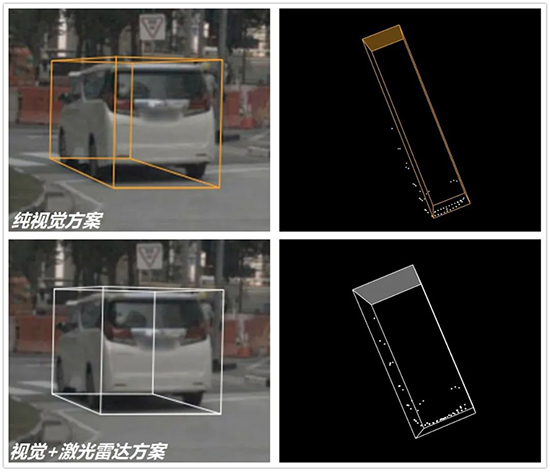
因為在2D圖像中,很容易找到車輛的左前角和右后角,但是左后角卻沒有明顯的特征,由于車輛尾部的傾斜、向上收窄,就會造成對整體寬度的低估。同時,依靠發動機艙蓋超出車頂的部分估算車長,也會導致在縱深方向上的高估。
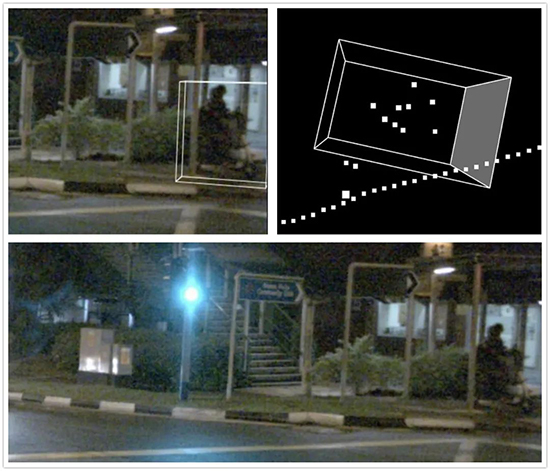
而這還僅僅是一個在高亮度環境下相對規則的物體,如果環境變暗,或是加入更多的遮蔽物、障礙物,情況會變得更加極端。比如在黑暗樹蔭中的二輪車,純視覺方案很難分辨。
因此,從根本算法上解決視覺信息的準確處理,就是特斯拉自動駕駛體系的絕對核心技術。
分析2D圖像的每個像素,將其還原成真實的3D場景,毫無疑問其中的核心能力,依然是圖像處理的算法以及支持這一算法的高算力硬件,也是特斯拉將其視覺方案進一步升級的體現。
如果特斯拉要依靠純視覺方案解決L4乃至L5級別的完全自動駕駛,通過強大的計算能力解決2D圖像到3D實景的轉換,是必須要攻克的難關。